
Activity Feed › Discussion Forums › Strictly Surveying › Traversing with GPS
Traversing with GPS
Posted by Flatmapper on April 1, 2022 at 4:06 amHello all! I??m still somewhat new to the surveying world and would like some clarification on some thoughts I had about a project I??m working on.
My company has been tasked with setting control along a 7 mile stretch of road to later on use for a mobile LiDAR scan. We have published control on both ends of the road and and one point in the middle to check to as well. We setup our base station on one end of the project, setting up a published control point, and verified it was good by checking into another local published control point. We then began setting a rebar as far as our radio signal from our base would allow us and would do two 30 sec occupations, twisting the the rod 180 between each occupation and then averaging the two. With this new averaged coordinate, we would set up our base, and check back to the previous base point with our rover to verify that we were still within tolerance. We would then repeat these steps until we get to the middle control point and come up with a misclosure. My question is, could I do a compass rule adjustment on these coordinates? I??ve never really done any kind of traverse adjustment of any kind and if someone could explain it to me as if I knew nothing about it that would be greatly appreciated. Thank you!
shawn-billings replied 2 years ago 14 Members · 22 Replies- 22 Replies

Yes, you could do a CR adjustment on that. Although least squares is more commonly used with GPS vectors. In fact LS is more commonly used for every type of adjustment these days, I think. And a much better way to do it. Those “control points” aren’t perfect and should be weighted.
FWIW, I would have occupied longer than 30 seconds. 3-5 minutes would be more like it.

Sorry but not really a good use for rtk although your method does add some redundancy. Static observations with network adjustment is less painful.
 Posted by: @mark-mayer
Posted by: @mark-mayerYes, you could do a CR adjustment on that. Although least squares is more commonly used with GPS vectors. In fact LS is more commonly used for every type of adjustment these days, I think. And a much better way to do it. Those “control points” aren’t perfect and should be weighted.
FWIW, I would have occupied longer than 30 seconds. 3-5 minutes would be more like it.
We tested for the optimal time on station with VRS and RTK, and found that longer than 30 second occupations didn’t provide any benefits, and even created worse shots depending on the time of day and as the constellation changed.
with all the newer receivers and channels and satellites, the methods are evolving still and should be tested in the organization for the best results for crew work flows.
the default setting for 180 epochs in observed control point with trimble had been there since 2005 when I started using GPS. Lots has changed.
 Posted by: @norm
Posted by: @normSorry but not really a good use for rtk although your method does add some redundancy. Static observations with network adjustment is less painful.
Agree 100%.
Two receivers on the published control, let them log data all day long while you leapfrog around with as many more receivers as you can get your hands on. Two occupations @ 10-15min (depending on project), change rod height in between. Can be constantly moving all day long and building a tighter network without even bothering with RTK.
I’d still be adjusting with least squares even if I only had RTK data. Or even just total station data. Compass rule isn’t really meant for GNSS data, it’s still an arbitrary method, and it can easily burn you on long linear traverses.
“…people will come to love their oppression, to adore the technologies that undo their capacities to think.” -Neil Postman
@rover83 i forgot to mention this project is for a water main for our in house engineers to design so the tolerance is set pretty high, pretty much if we are within half a foot we are good. But are you saying a compass rule adjustment would make our traverse worse?
I??ve learned about LSA in school but have never applied it in real life scenarios and would love to know the best way to approach jobs like this in the future.
I agree that static would be the better way to go here, but we have an OP asking if a CR adjustment is possible, and for step by step instructions on how to do it. I doubt that static vectors are an option for this person. Dittos with least squares.
I also agree that there isn’t a lot gained by occupying for 180 seconds rather than 30. But there is something in it, and it’s a tiny fraction of the overall time to perform these leapfrog operations, so I’d do it.
If I were running the OPs project I would probably go about it a different way, placing a higher priority on getting the base station in very open spots well off the route of the survey. I’m thinking about how that same control would be used in the subsequent phases of the project, and how I’m going to get it on the 2022 datum later if I need to. I’d be sprinkling in OPUS solutions, and weighting the brass appropriately. Etc., etc. But the OP wants to know how to do a CR adjustment which is suggestive of the resources and capabilities at hand. His method is good enough to support a LIDAR campaign.

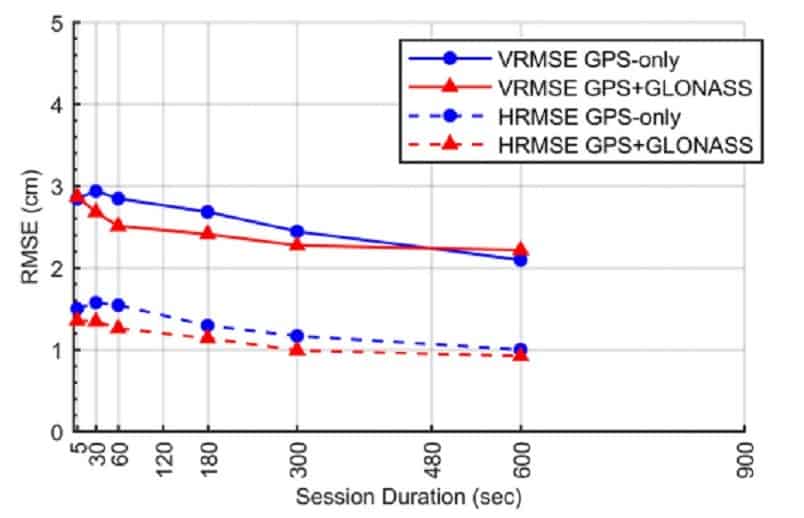
From an NGS presentation
 .
.
Interesting little thread. It looks like 150 seconds is getting you an additional 2 or 3 millimeters of accuracy – that juice isn’t worth the squeeze for me unless it’s a client standard, and I’d keep rolling with 30 second observations.
Pursuing static is the easiest, but if you’re limited to RTK one thing that will help (and that you’re probably already doing) is maximizing your radio range. Less setups in your scenario will result in less error. Over 7 miles, I would hope a base radio in the middle or on some high ground would cover most or all of it, depending on topography. Try to seize the high ground when dealing with radio.
@mark-mayer
understood. I wasn’t picking on you, I was trained the same way, and then trained again and indoctrinated to the current scheme etc.
I’m always looking to learn and still hold the value of the previous methods because they built the current ones.
- Posted by: @said-lot
base radio in the middle or on some high ground would cover most or all of it, depending on topography. Try to seize the high ground when dealing with radio.
or 5 miles away on the other side of the valley for the bigger win.
at 35w a tdl 450 can reach out hundreds of miles if used correctly
just ask those guys in Utah when we were blasting it away in Nevada…
??? ???? ???ñ
NGS probably tested in ideal circumstances, and I’ll let Bill follow up as he provided that graphic.
the idea is(I think) that the distance from horizon horizon is negligible in that span because of the processor lag to even display it in the DC screen, that’s what I have noticed anyway prior to the whole xfill RTX etc. correction deal is now and then there is the ionospheric delay disturbance yada yada yada… where is GeeOdd Mike?
Here’s another one, I will have to dig up the paper it came from, but if I remember correctly this was only with GPS+GLO:
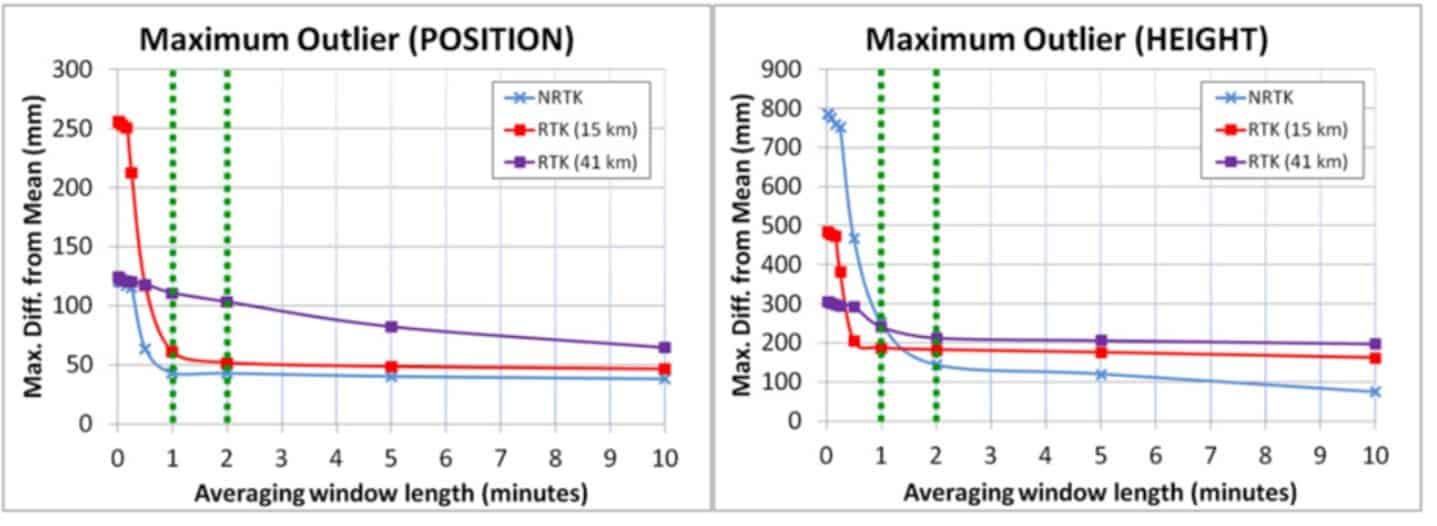
(Edit to add: note that these are not final precisions, but max outliers for the depicted windows. Final averaged precisions would obviously be different.)
“…people will come to love their oppression, to adore the technologies that undo their capacities to think.” -Neil Postman- Posted by: @lurker
Can anyone provide a plausible reason why 5 seconds in that graph would produce better results than 30 seconds? It seems counter intuitive.
real time kinematic survey by definition is a location of a “rover” at the instant of observation. Yet surveyors are intent to get “static” results of a system designed to return a location the instant a “rover” is observed.
RTKn (network) accuracy is represented as the standard deviation one can expect taking 1 epoch observations on a stationary point. Our recent testing on our RTKn using multi- constellation receivers using 30 + birds show no gain taking observations over 5 seconds in either horizontal or vertical results. Those who want to use RTK observations as static observations are not using the system for what it is designed for. I understand the temptation to try. We spent a lot of time developing methods to get static accuracy from RTK observations. Most of these methods or close variations have been discussed on this forum. What we discovered is that sometimes it works and sometimes it doesn’t and by the time you’ve taken enough repeated observations to get those results you may have just as well done it the right way to start with.
 Posted by: @jitterboogiePosted by: @mark-mayer
Posted by: @jitterboogiePosted by: @mark-mayerwith all the newer receivers and channels and satellites, the methods are evolving still and should be tested in the organization for the best results for crew work flows.
the default setting for 180 epochs in observed control point with trimble had been there since 2005 when I started using GPS. Lots has changed.
The 3 minute time and Observed control point option in Trimble Access is for allowing Trimble Business Center to do more with that observation in Network Adjustment.

As long as long as you have cell service why not use one the net services of Leica (SmartNet) or Trimble and get the best of both worlds and you can then use the data from their reference stations or other CORS to perform post processing if you’re really wanting high accuracy but you mentioned plus or minus a foot so we’re starting to compare apples to oranges as to what method is more accurate. With network RTK and a 10 second occupation I typically get +/-0.10′ (XYZ) using Leica’s SmartNet even on the fringes of their availability map.
Is there any chance anyone could use this as an example of how to explain convergence angles and why/how they??re needed to adjust what sounds like an open loop traverse? What IS the difference between doing it the OP??s way and doing it Mayers way? Aside from the longer baselines (which I thought I was hearing weren??t that great for corrections), and assuming reasonably consistent orthometric heights over the 7 miles, does one method make the Compass Rule less heavily burdened by different convergence angles and scale factors? Does it depend on whether the 7 miles is North-South or East-West? If the OP had a BOB between the initial/terminal ends of the traverse, while Mayer had a BOB between his two [remote] control points, would there be any difference between how you would present the coordinates of your control network?

With GPS adjustments you don’t even get to convergence angles or scale factors or XYZ coordinates.
Coordinates are simply functions of the underlying data.
It’s relatively simple to adjust GPS networks without any coordinate system applied. Even a compass rule adjustment should be simple to apply to Lat, Long, Height data. Not that I would do or recommend it, but it should be easy to do.
If you want to use GPS there are many least squares programs available for the purpose of adjustments.
Normally for a corridor survey we wouldn’t even look at the XYZ until all adjustments were completed.

Each grid point will have a convergence angle and each point will have a scale factor, but they don’t play into an adjustment of the measurements.
Note that while a CR adjustment operates on the coordinates it should be thought of as an adjustment of the measurements between the points.



Log in to reply.